Probekörpermagazin
Probekörpermagazin und Feeder
Von der realen Anlage stehen einige Fotos und Videos zur Verfügung. Diese sind unter der Creative Commons Lizenz CC-BY 4.0 veröffentlich und können daher frei verwendet werden. Als Quelle ist L. Baron, IfA, TU Dresden anzugeben. Ein Link auf die entsprechende Seite, wenigstens aber auf https://agtele.eats.et.tu-dresden.de/mcs wäre wünschenswert.
Im Zuge der Updates der Revision wurde eine neue Baugruppe zu Zuführung von Probekörpern konstruiert und umgesetzt. Damit ist es möglich Probekörper auch automatisch und aus der Ferne per API zuzuführen oder lokal mittels Druckknopf. Dazu wird ein Servomotor der Firma Hitec als Antrieb verwendet, welcher mittels des CAN-Protokolls mit der SPS kommuniziert. Der mechanische Aufbau mit den roten Platzhaltern sichert einen minimalen Abrieb an den Probekörpern selbst sowie das waagerechte und somit verkantungsfreie Herunterrutschen der oberen Probekörper, wenn der untere aus dem Magazin geschoben wird. Es folgt eine Fotodokumentation des Aufbaus sowie Videos der Inbetriebnahme:

Der Feeder von schräg-oben im fertig montierten Zustand. Zu sehen ist der vertikale Teil, das Magazin mit den roten Abstandshaltern, und der horizontale Teil, der eigentliche Feeder mit den roten Antriebshebeln.
Weiterhin ist in der Mitte der rote Reflexlichttaster zu sehen, welcher der Synchronisierung der Probekörperposition vor dem eigentlichen Zuführen dient sowie der Leer-Erkennung.
Links ist weiterhin der grüne Druckknopf mit der Bezeichnung S10 für die manuelle Bedienung vor Ort zu sehen.
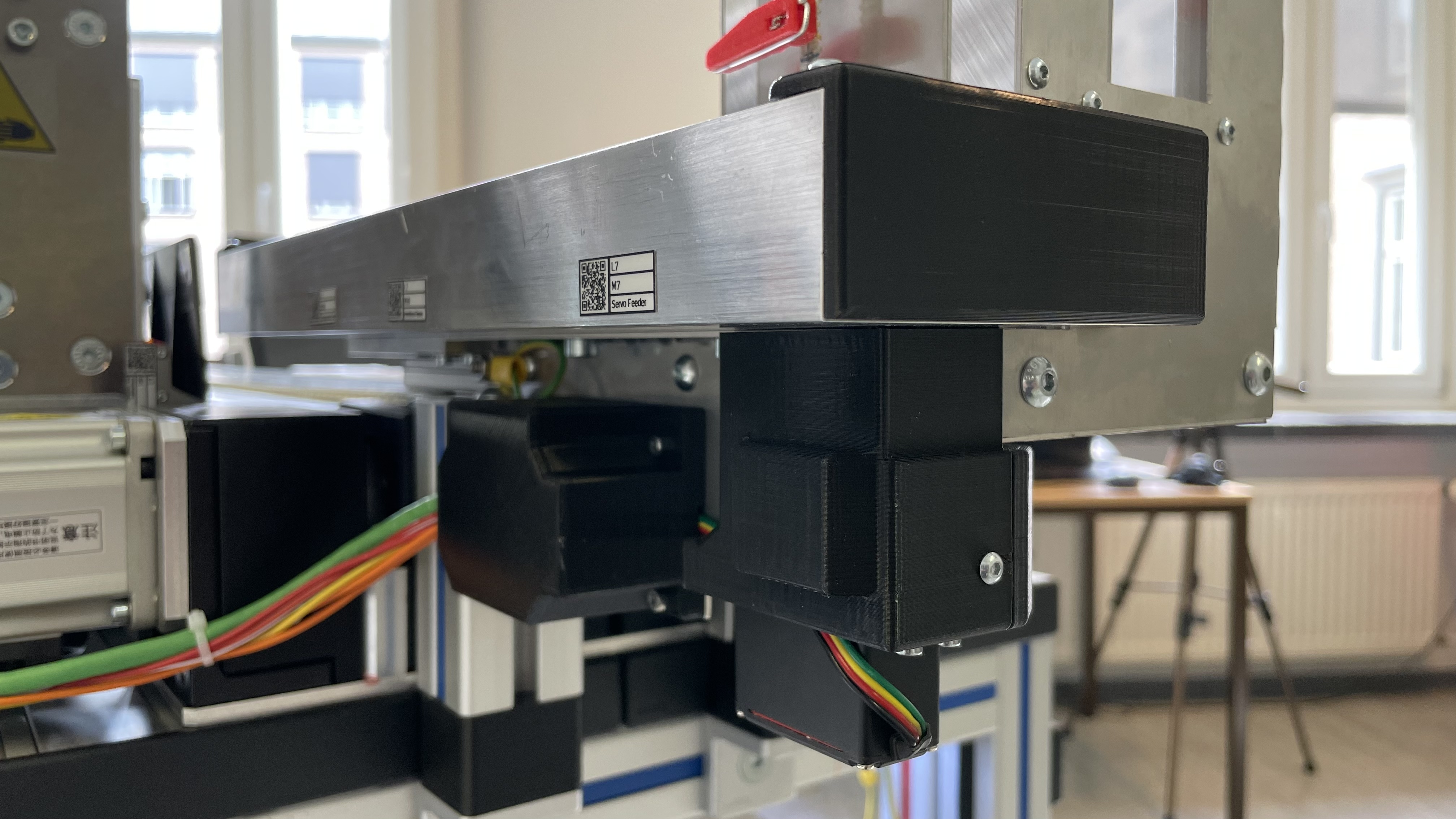
Der CAN-Bus-Servo treibt den Feeder an. Die mechanischen Teile des Antriebs sind mittels Verkleidung vor Hineingreifen geschützt.
Zur Herstellung der Abdeckungen wurde ein 3D-Druckverfahren verwendet.
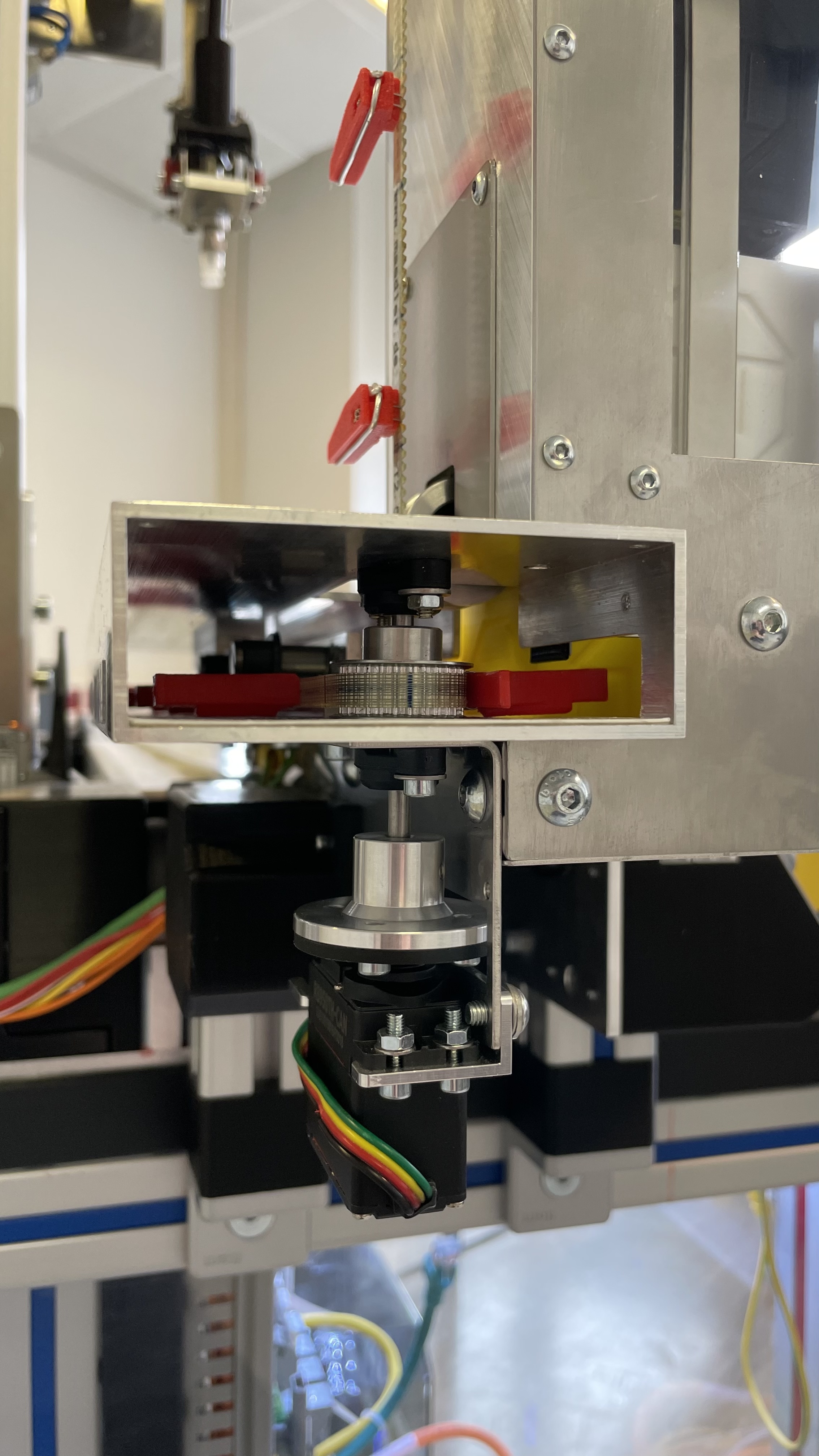
Ohne die Schutzblenden ist das Innere des Feeders sowie die mechanische Kupplung zum Servomotor zu erkennen.
Der Zahnriemen wird durch den Motor angetrieben, wodurch die roten Hebel bzw. Mitnehmer die Probekörper auf dem horizontalen Teil vorschieben.
Im Inneren des Feeders links im Bild sind Führungsrollen zu erkennen, die ein Driften des Zahnriemens verhindern, damit die mechanische Verbindung zwischen Mitnehmer und Zahnriemen (ein Draht) nicht mit den Führungsringen des Zahnrads kollidieren.
Am Antriebsrad ist zu erkennen, dass der Zahnriemen genau mittig geführt wird.
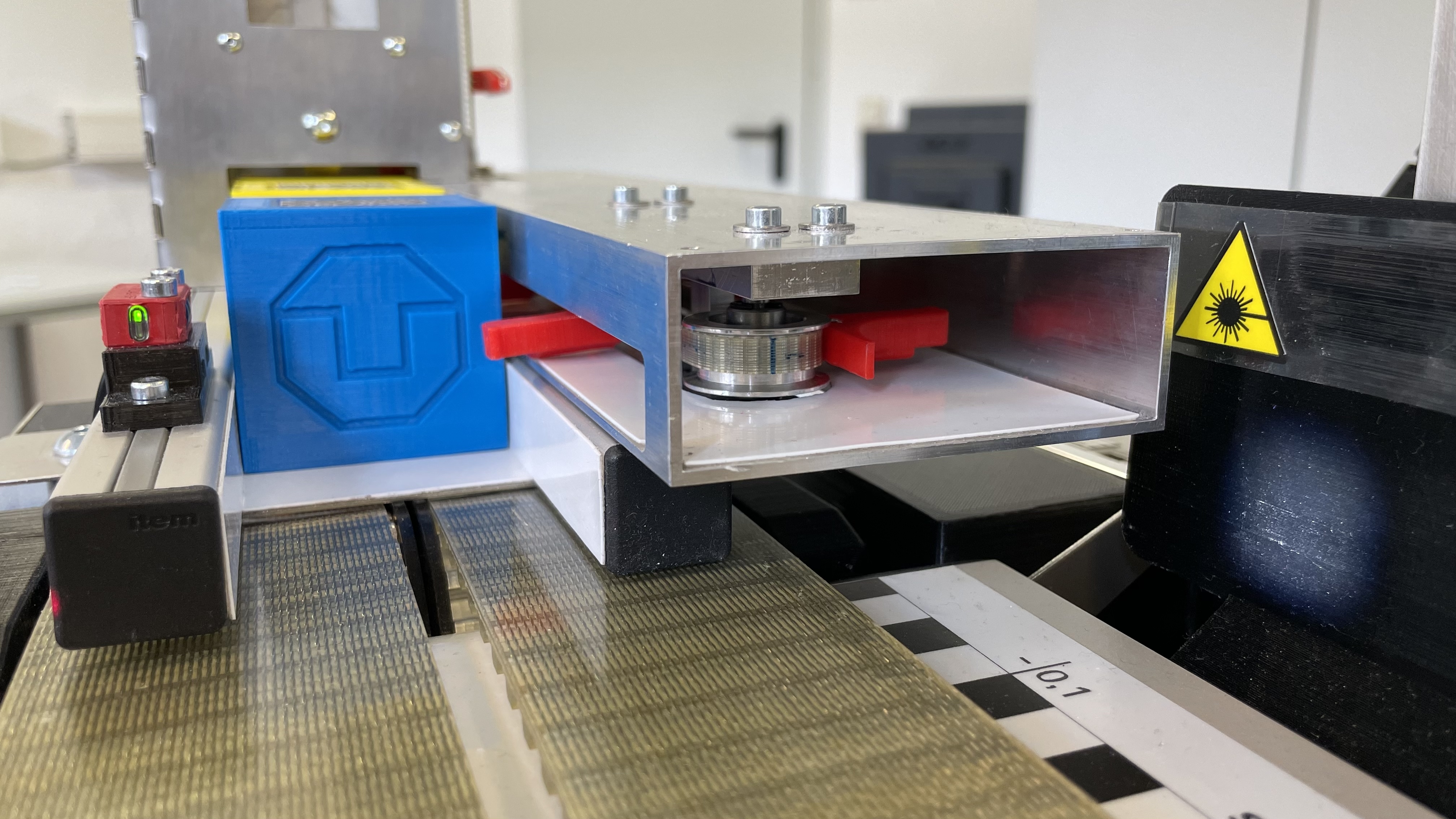
Auf der anderen Seite des Feeders ist die Spannvorrichtung des Zahnriemens zu sehen.
Im sichtbaren Metallblock ist eine Feder enthalten, die einen Bügel in Position hält, in welchem gleichzeitig auch dieser Bügel geführt wird.
Ein zweiter Teil des Spanners befindet sich unterhalb der Feeder-Gehäuses.
Der Spanner sichert den Feeder und auch den Antriebsmotor außerdem vor mechanischer Zerstörung bei einer Verklemmung.
Durch das Nachgeben des Spanners und dem damit verfügbaren Spielraum des Zahnriemens können die roten Mitnehmer nachgeben und im Zweifel dreht das Antriebszahnrad durch, sodass der Motor nicht blockiert und sich dadurch zerstört.
Außerdem ist die weiße Beschichtung zu sehen, die mechanischem Abrieb vorbeugt, der sonst zwischen dem Metall und den gedruckten Teilen entstehen würde.
Im Linken Teil ist nochmals der Reflexlichttaster sichtbar, welcher in der dargestellten Situation die Probekörper im Feeder noch nicht detektiert.
Dies bedeutet, dass zunächst eine Synchronisation der Probekörper mit der Startposition nötig ist, nachdem die Probekörper in den Feeder gegeben worden sind.
Inbetriebnahme
Die Nahaufnahme des Feeders mit dem Druckknopf im Vordergrund zeigt die Funktionsweise des Feeders:
Links unten ist der CAN-Bus-Servo zu erkennen und im Hintergrund der Roboterarm der Anlage.
Nach Freischaltung durch den Betriebsmodus der Anlage befindet sich der Feeder im nicht-synchronisierten Zustand, das Blinken des Druckknopfs weist darauf hin.
Über die Fernbedieneinrichtung wird die Synchronisation des Feeders mit der Initialposition hergestellt.
Dazu verfährt der Feeder die Probekörper schrittweise, bis der Reflexlichttaster einen Kontakt meldet.
Anschließend ist der Feeder betriebsbereit und zeigt dies durch konstantes Leuchten des Tasters an.
Über die Bedieneinrichtung wird zunächst der Befehl gegeben genau einen Probekörper einzugeben.
Anschließend werden auf Befehl so viele Probekörper automatisch zugeführt, bis der Feeder leer ist.
Die Leer-Erkennung erfolgt wiederum mittels des Versuchs der Synchronisation.
Jedoch gibt es eine Maximalzeit bzw. eine Maximalstrecke, deren Überschreiten bedeutet, dass der Feeder leer ist.
Anschließend wird ein Probekörper eingegeben und der Ablauf wiederholt, allerdings dieses Mal unter Einsatz des manuellen Druckknopfs.
Hier wird ein ähnlicher Ablauf gezeigt, allerdings dieses Mal aus Sicht des Bedienpersonals.
Sichtbar wird hierbei auch die Funktionsweise des Magazins.
Gezeigt wird hier die Interaktion zwischen Feeder- und Magazin-Mechanik.
Die roten Mitnehmer im Feeder (horizontale Bewegung links) treiben die Probekörper an.
Wird dadurch die Position zuunterst im Magazin frei, können mittels Schwerkraft die Probekörper im Magazin nachrücken.
Das Reiben der vertikal gestapelten Probekörper aneinander verhindern die roten Abschandshalter im Magazin.
Diese geben das vertikale Nachrücken erst frei, wenn der Probekörper zuunterst das Magazin komplett verlassen hat.
Das sichert ebenfalls auch, dass die nachrückenden Probekörper nicht verkanten und waagerecht nach unten rutschen.
Die Abstandshalter minimieren die Reibung außerdem auch so, dass die Belastung des Antriebs reduziert wird.
Somit ist es möglich niedrige Grenzwerte für das Antriebsmoment vorzugeben und so sowohl Verletzungen bei Hineingreifen zu vermeiden als auch eine Zerstörung des Antriebs bei Blockieren.